Robot Operating System (ROS) is a powerful and versatile framework for developing and controlling robots. Learning ROS offers a wide range of benefits for both beginners and experienced roboticists.
The complete course is structured into several sections. The ROS2 Fundamental Part I and II, ROS2 Practical, and Making ROS2-based mobile robot.
ROS2 Fundamental Part I
You will learn about :
Ubuntu and ROS2 Humble Installation
Linux Basic commands
ROS2 basics
Configure environment
Understanding nodes
Topics, Services, Actions and Parameters
Subscriber and publisher
Running and launching nodes
Service server and client
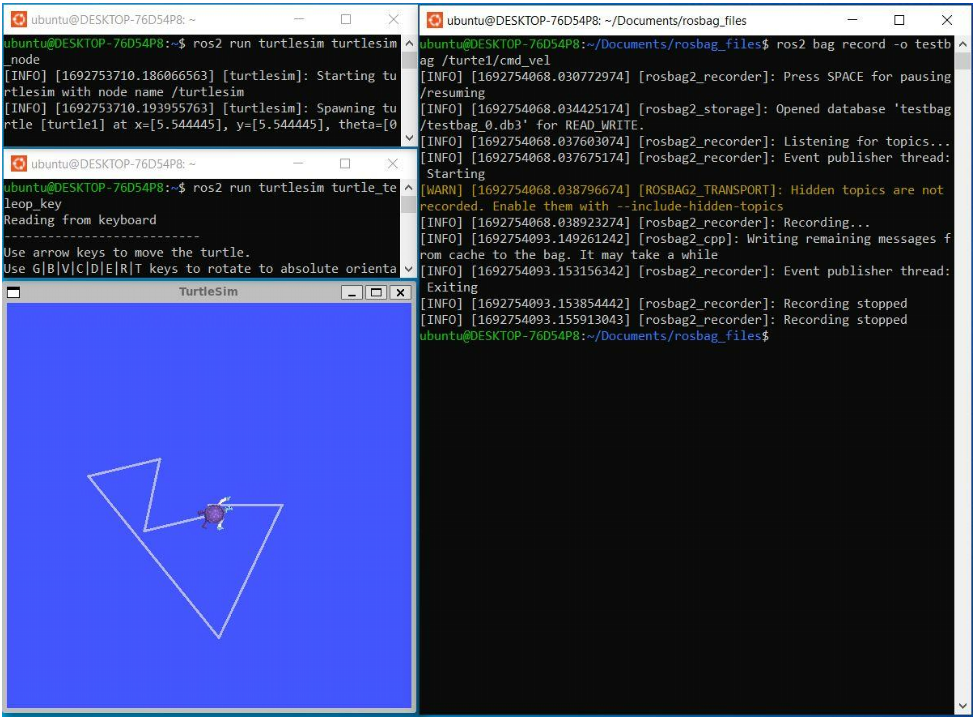
rqt tools, ros2_bag
Running ROS2 robot
Clickhere for more information and for registration.
ROS2 Fundamental Part II
You will learn about:
ROS 2 basic refreshing
Using colcon to build packages
Creating workspace and packages
Create simple Publisher and subscriber
Create simple service and client
Create and implementing custom msg and srv files
Clickhere for more information and for registration.
ROS2 Practical
You will learn about:
ROS 2 basic refreshing
Using Gazebo Simulator
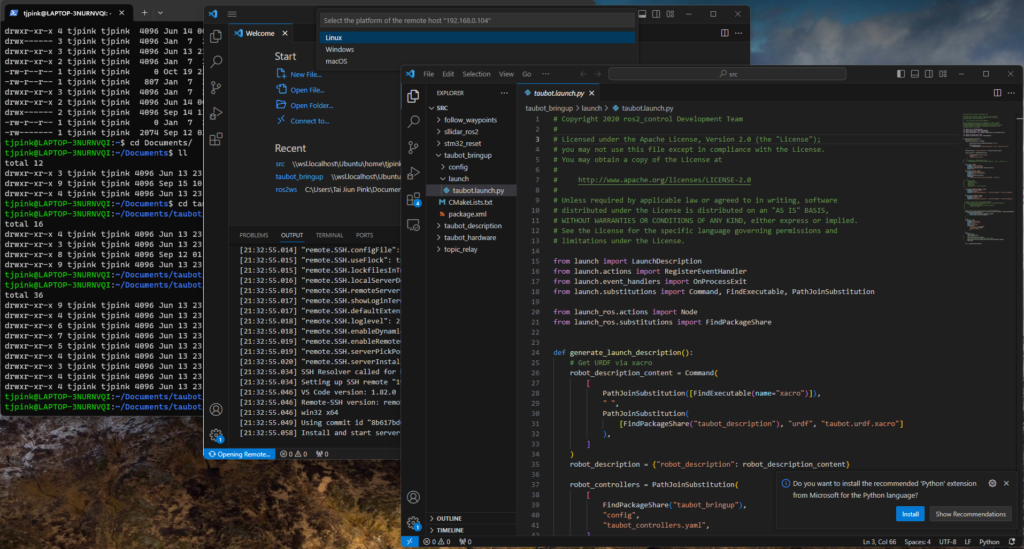
Creating Launch file
Introducing tf2
URDF
Building Visual robot model
Using Xacro
Generating URDF file
Usign rviz2
Running on physical robot
Clickhere for more information and for registration.
Making ROS2-based mobile robot
You will learn:
Understanding components parts
Singleboard Computer (Raspberry Pi)
Controller and drivers
Lidar, IMU, camera, other sensors
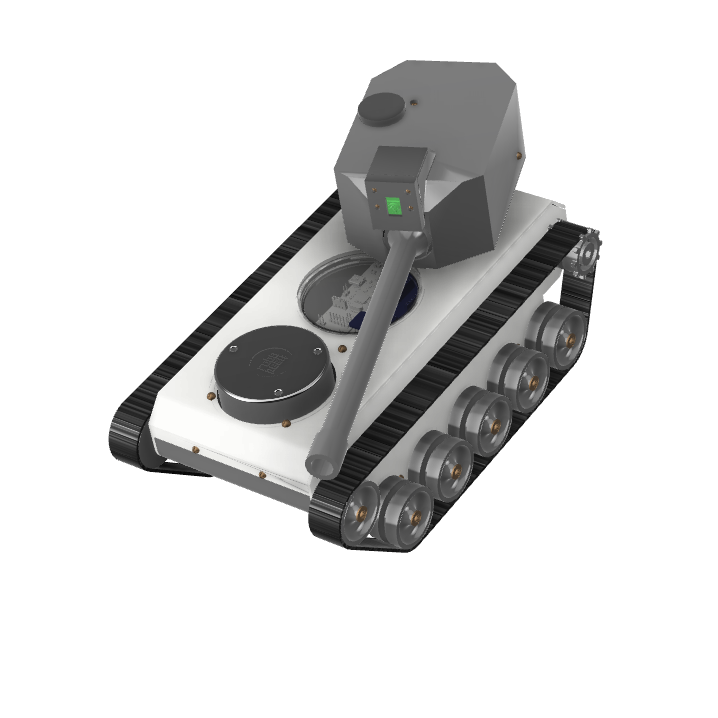
Robot construction
Implementing Hardware Interface
Configure
export state interface
export command interface
start, stop read, write
Implementing ROS2 Control and Controllers
Differential drive
Configuration
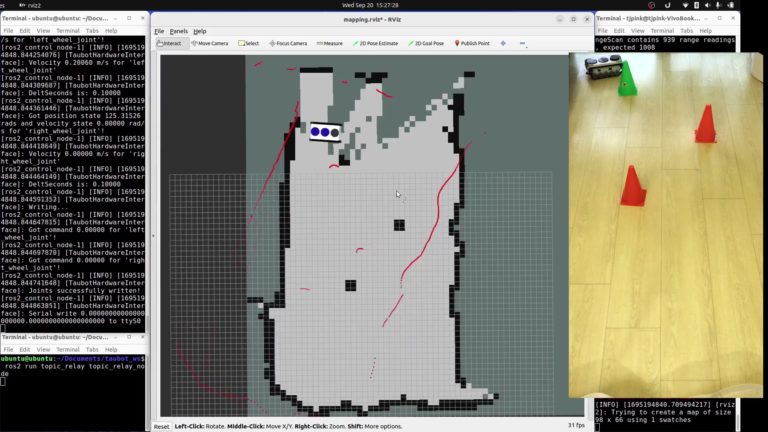
Navigation 2
Clickhere for more information and for registration.